Sensor BMP180, definiciones y funcionamiento.
El sensor BMP180 es un sensor de presión atmosférica de alta
precisión.
Diagrama de conexión con placa Arduino UNO.
Figura de diagrama de
conexión BMP180 y Arduino UNO.
Para usar este sensor con Arduino podemos utilizar la librería
BMP180, que puedes descargar en el siguiente enlace: https://goo.gl/cbhBLy
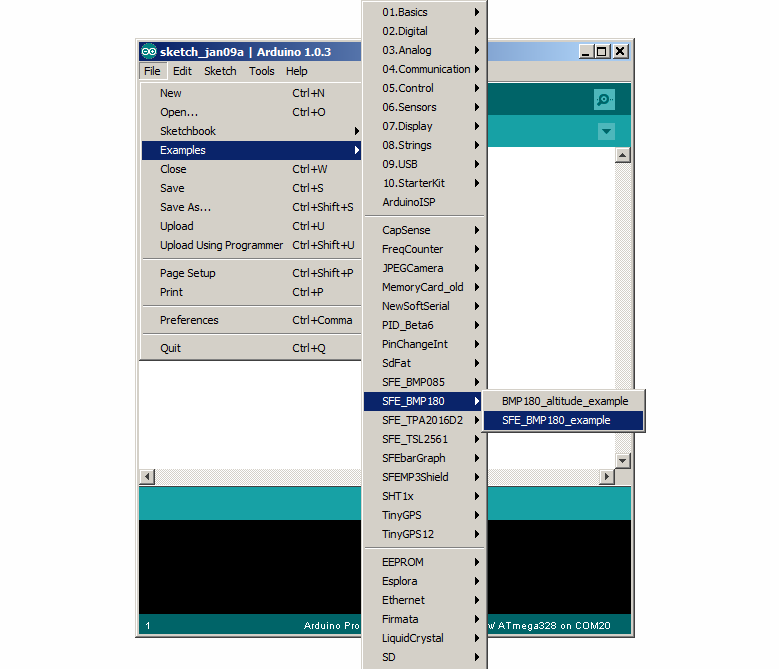
Una vez que hayas descargado e instalado la librería, puedes
comenzar utilizando los ejemplos de código que contiene la librería.
Figura de donde
localizamos los ejemplos de la librería BMP180.
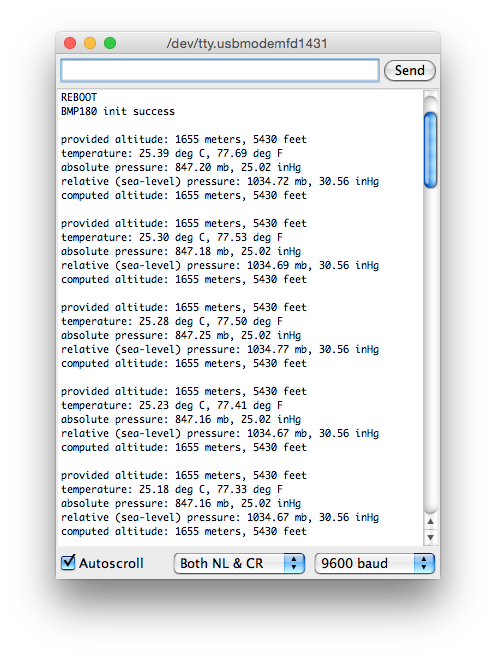
Abrimos el sketch de ejemplo y lo
cargamos a la placa Arduino, abrimos el puerto serial a 9600 baudios. Recibiremos
un mensaje diagnóstico, en dado caso que nos arroje un mensaje de que no encuentra
el sensor debemos revisar si nuestra conexión sea correcta.
Figura del monitor
serial que muestra las lecturas obtenidas del sensor BMP180.
Necesitas mas información sobre la presión atmosférica y como obtener la altitud, continua leyendo los párrafos debajo.
¿Qué es la presión atmosférica?
La presión es una fuerza
“presión” ejercida sobre un área. La unidad de medida de la presión más común
son las libras por pulgada al cuadrado (psi). Una libra ejerciendo presión
sobre un área es igual a 1psi. En el sistema internacional es el newton por
metro cuadrado, el cual se le denomina Pascal (Pa).
Figura de representación
de la presión atmosférica.
Hay varias situaciones donde la
presión puede ser medida (gravedad, tirones, etc.), pero en este artículo nos interesa
la presión
atmosférica, la cual es la fuerza que el aire está ejerciendo sobre
todas las cosas, incluyéndonos. La presión atmosférica es creada por el peso de
los gases en la atmosfera. Normalmente no notamos el peso del aire, pero si
colocamos una columna de 1 pulgada de grosor con aire, desde el nivel del mar
hasta tocar la atmosfera, esta podría pesar alrededor de 14.7 libras (1 cm de
grosor de aire podría pesar alrededor de 1kg). Este peso, ejerce una presión en
la base de la columna, la presión atmosférica generada en esta columna es la que
nosotros podemos medir con sensores como el BMP180.
Debido a que una columna de aire,
de 1 pulgada de grosor pesa alrededor de 14.7 libras, y está presionando un
área de 1 pulgada al cuadrado, la presión promedio sobre el nivel del mar es
aproximadamente 14.7 libras por pulgada cuadrada (psi), o 101,325 Pascales.
Esto puede incrementar cerca de 4% por cada 1000 pies (o 300 metros) que se
hacienda. A mayor altura, menor presión es ejercida, porque la base del punto más
alto situado en la atmosfera es mucho más corta y por consiguiente tiene menor
peso. Teniendo estos datos como referencia podemos calcular la altitud a la que
nos encontremos.
Figura de columna de
aire, representando la presión atmosferica.
Nota: La presión del aire a 12,500
pies (3810 metros) es la mitad que en el nivel del mar.
El BMP180 obtiene la presión
absoluta en pascales (Pa). 1 Pa es una unidad de medida relativamente pequeña,
aproximadamente la presión que ejerce una hoja de papel sobre una mesa. Podemos
referirnos a unidades más grandes en unidades de hectopascales (1 hPa = 100 Pa)
o kilo pascales (1 kPa = 1000 Pa). La librería de Arduino nos muestra los datos
obtenidos en valores de punto flotante en hPa, el cual aparece en milibares
(mbar).
Aquí tenemos algunas conversiones
de unidades de presión:
1 hPa = 100 Pa = 1 mbar = 0.001 bar
1 hPa = 0.75006168 Torr
1 hPa = 0.01450377 psi (pounds per square inch “libras por pulgada al
cuadrado”)
1 hPa = 0.02953337 inHg (Pulgadas de mercurio)
1 hpa = 0.00098692 atm (atmosferas estándar)
El efecto de la temperatura
La temperatura afecta la densidad de un gas, y la densidad afecta la
masa de un gas, y la masa afecta la presión, por lo cual concluimos que la presión
atmosférica sufrirá cambios dramáticos en relación a la temperatura del
ambiente.
El BMP180 incluye un sensor de precisión para medir los cambios de
temperatura en el ambiente. Para el funcionamiento del sensor, primero
necesitamos leer la temperatura, después se le añade una lectura inicial de la presión
para al final obtener una medida final de temperatura y presión.
Medición de la presión absoluta
Como hemos mencionado, si requerimos la medición de la presión absoluta,
todo lo que tenemos que hacer es obtener la lectura de la temperatura. La
lectura de la presión final está dada en hPa = milibares. Si se desea también
se puede realizar la conversión de unidades dependiendo de los factores de
conversión que se desee.
NOTA: la presión absoluta atmosférica varía dependiendo de la altitud y
del clima al cual nos encontremos.
Observaciones sobre el clima
La presión atmosférica en cualquier lugar de la tierra ( o en cualquier
lugar de la atmosfera) no es constante. La interacción entre los giros de la
tierra, eje de inclinación, y muchos otros factores resultan con el movimiento
de las áreas o zonas de presión más altas y bajas, las cuales ocasionan las
variaciones en el clima que vemos todos los días. Por la observación de los
cambios de presión, podemos predecir pequeños cambios en el clima. Por ejemplo,
las pequeñas disminuciones en la lectura de la presión usualmente indican que
el clima es húmedo o una tormenta esta se acerca. Un incremento en el clima
indica que el día está siendo soleado.
Pero recordemos también que la presión atmosférica también varía
dependiendo de la altitud.
Determinando la altitud
Debido a que la presión es directamente proporcional a la altitud,
podemos usar el sensor de presión absoluta para medir la altitud.
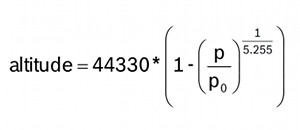
La medida promedio de la presión atmosférica a nivel del mar es de
1013.25 hPa (o mbar). Esto puede variar dependiendo del incremento del vacío en
el espacio. Ahora podemos obtener la altitud dependiendo de la medición de la
presion (P y pₒ) usando la siguiente ecuación.
Exactitud: ¿Qué tan exacto es? El nivel de error en teoría del sensor
BMP180 es de 0.25m (aproximadamente pulgadas), Sin embargo, en la práctica
podemos detectar un error del orden de 1m (40 pulgadas).
Clima: También debemos recordar que la presión sufre cambios dependiendo
del clima, tenemos que tener en cuenta que esto puede afectar nuestras
mediciones.
Altitud máxima: El BMP180 no puede medir todos los tipos de vacío (o
fuera del espacio). Esta indicado que su límite es cerca de 300 hPa (mbar), el
cual corresponde a una altitud alrededor de 3000m o 30,000 pies. Las personas
que han estado a estas alturas volando y han experimentado resultandos exitosos
con este sensor, pero esto no es garantizado. (para obtener medidas a gran altura
podríamos considerar usar un GPS).
Altitud minina: De igual forma el
sensor no puede estar situado a una presion mayor a 1100 hPa o 16 psi, los
cuales corresponde cerca de 500 pies por debajo del nivel del mar. Este sensor no
es buena opción para utilizarlo en un sumergible, o mediciones de gas
comprimido.
Tips y Recomendaciones:
El voltaje correcto de alimentación:
El sensor BMP180 funciona con voltajes desde 1.8V a 3.6V. el voltaje
recomendado es de 3.3V. Nunca lo conecte a un voltaje mayor a 3.6V.
Dale aire: Recordar que el sensor
BMP180 necesita estar en contacto con el aire del ambiente para medir su presión,
así que no lo coloque en lugares cerrados. Puede adjuntarle pequeñas compuertas
que permitan la circulación de este, en caso de que lo tenga en un recipiente.
Pero no demasiado aire: De otra
forma, una explosión como aire en movimiento por ejemplo al movimiento de un
auto, ya que causa momentáneas variaciones en la medición que pueden afectar
las lecturas de las mismas. Protégelo el dispositivo de fuertes corrientes de
aire.
Mantenlo fresco: Porque una medición
exacta de temperatura es necesaria para el cálculo de la presión, intenta no
exponerlo a cambios rápidos de temperatura.
Mantenlo seco: El BMP180 es
sensible a la humedad. No lo sumerja o deje en contacto con líquidos.




























{kind=link}
{kind=link}
{kind=link}